




















1. Úvod do střídavých měničů (frekvenčních měničů) V oblasti moderního průmyslového řízení a......
ČTĚTE VÍCE
Domů / Novinky / Novinky z oboru / Vysvětlení AC servomotoru: Jak to funguje, typy a jak vybrat ten správný
Vysvětlení AC servomotoru: Jak to funguje, typy a jak vybrat ten správný
Co je AC servomotor?
Střídavý servomotor je typ elektrického motoru, který běží na střídavý proud a je navržen tak, aby poskytoval přesné ovládání polohy, rychlosti a točivého momentu. Na rozdíl od běžného střídavého motoru, který se otáčí pevnou rychlostí, servomotor neustále přijímá zpětnou vazbu z kodéru připojeného k jeho hřídeli. Tato zpětná vazba říká systému přesně, kde se motor v daném okamžiku nachází, což mu umožňuje provádět korekce v reálném čase a držet svou cílovou pozici s vysokou přesností.
Slovo „servo“ pochází z latinského slova pro otroka – a to je v podstatě to, co dělá. Věrně následuje příkazy z ovladače a průběžně se přizpůsobuje jakékoli požadované poloze, rychlosti nebo točivému momentu. To dělá ze střídavých servomotorů páteř moderní automatizace, CNC strojů, robotiky a všech aplikací, kde záleží na přesnosti pohybu.
To, co odděluje AC servomotor od DC servomotoru, je zdroj energie a konstrukce. Střídavé servomotory jsou obecně odolnější, vyžadují méně údržby (žádné výměny kartáčů) a jsou vhodnější pro vysokorychlostní a vysoce výkonná průmyslová prostředí. Téměř vždy se používají spolu se servopohonem (také nazývaným servozesilovač) a pohybovým ovladačem k vytvoření kompletního servosystému s uzavřenou smyčkou.
Jak funguje AC servomotor
Základním principem střídavého servomotoru je řízení zpětné vazby s uzavřenou smyčkou. Zde je přímý přehled toho, jak systém funguje od začátku do konce:
- Vstup příkazu: Ovladač pohybu (PLC, CNC ovladač nebo PC) posílá cílovou hodnotu – například „otočení o 90 stupňů“ nebo „otáčení při 3 000 ot./min“ – do servopohonu.
- Výstup servopohonu: Servopohon převádí povel na přesně řízené střídavé napětí a proud, který je přiváděn do motoru.
- Pohyb motoru: Rotor motoru se pohybuje v reakci na elektromagnetické pole vytvářené vinutím statoru.
- Zpětná vazba kodéru: Rotační enkodér namontovaný na hřídeli motoru nepřetržitě měří aktuální polohu a rychlost a odesílá tato data zpět do servopohonu.
- Oprava chyb: Pohon porovnává aktuální polohu s přikázanou polohou a okamžitě upravuje výstup tak, aby eliminoval jakýkoli rozdíl (nazývaný "chyba").
Tato smyčka běží stovky nebo tisícekrát za sekundu, a proto mohou servosystémy dosahovat tak úzkých tolerancí. Kodér je kritickou součástí – většina moderních střídavých servomotorů používá kodéry s vysokým rozlišením se 17bitovým nebo 23bitovým rozlišením, což znamená, že dokážou detekovat miliony různých pozic za otáčku.
Typy AC servomotorů
V průmyslu se dnes používají dva hlavní typy střídavých servomotorů, z nichž každý má jiné provozní principy a ideální případy použití.
Synchronní AC Servo Motor (PMSM)
Synchronní AC servomotor — také známý jako synchronní motor s permanentními magnety (PMSM) — používá permanentní magnety zabudované v rotoru. Rotor se otáčí v přesné synchronizaci s rotujícím magnetickým polem ve statoru. Protože jsou magnety vždy v záběru, tento typ motoru produkuje vysoký točivý moment i při nízkých otáčkách a má vynikající dynamickou odezvu.
Synchronní servomotory jsou zdaleka nejběžnějším typem používaným v průmyslové automatizaci a CNC aplikacích. Jsou kompaktní, efektivní a schopné udržet jmenovitý točivý moment v širokém rozsahu otáček. Všechny značky jako Mitsubishi, Fanuc, Yaskawa a Siemens nabízejí synchronní servomotory jako svou primární produktovou řadu.
Indukční AC servomotor (asynchronní)
Indukční servomotor používá rotor s klecovou klecí, kde je proud indukován rotujícím magnetickým polem – nejsou zde žádné permanentní magnety. Rotor vždy mírně zaostává za polem statoru (toto se nazývá "prokluz"), což je způsob generování točivého momentu. Když jsou indukční motory spárovány se servopohonem s vektorovým řízením, mohou také dosáhnout dobrého řízení rychlosti a točivého momentu, i když obvykle nejsou tak přesné nebo citlivé jako synchronní typy.
Indukční servomotory jsou často vybírány pro vysoce výkonné vřetenové aplikace, jako jsou vřetena CNC frézovacích strojů, kde záleží na velmi vysokých rychlostech a robustnosti více než na velmi přesném polohování. Jsou také levnější při vyšším výkonu.
Klíčové specifikace, kterým musíte porozumět
Před výběrem nebo prací s jakýmkoli střídavým servomotorem musíte porozumět základním specifikacím v datovém listu. Zde je přehledný přehled nejdůležitějších parametrů:
| Specifikace | Co to znamená | Proč na tom záleží |
| Jmenovitý točivý moment (N·m) | Trvalý krouticí moment, který může motor produkovat při jmenovitých otáčkách | Musí překročit zatěžovací moment včetně tření a setrvačnosti |
| Špičkový točivý moment (N·m) | Maximální točivý moment pro krátké dávky (obvykle 2–3× jmenovité) | Potřebné pro fáze zrychlení a zpomalení |
| Jmenovitá rychlost (RPM) | Normální provozní rychlost při jmenovitém točivém momentu | Určuje, zda motor vyhovuje vašemu profilu pohybu |
| Jmenovitý výkon (W nebo kW) | Výstupní mechanický výkon (točivý moment × rychlost) | Používá se k přizpůsobení měniče a velikosti kabelů/jističů |
| Rozlišení kodéru | Počet impulsů nebo bitů na otáčku | Vyšší rozlišení = jemnější ovládání polohy |
| Setrvačnost rotoru (kg·cm²) | Odolnost rotoru vůči změnám rychlosti otáčení | Pro stabilní ovládání musí být přizpůsobena setrvačnosti zátěže |
| Hodnocení IP | Úroveň ochrany proti prachu a vniknutí vody | Kritické pro drsná nebo vlhká prostředí |
Střídavý servomotor vs krokový motor: Který byste měli použít?
Jednou z nejčastějších otázek při řízení pohybu je, zda použít střídavý servomotor nebo krokový motor. Oba mohou ovládat polohu, ale fungují velmi odlišně a vyhovují různým aplikacím.
Krokový motor se pohybuje v pevných krocích (krokech) a pracuje s otevřenou smyčkou – což znamená, že ve většině základních nastavení neexistuje žádná zpětná vazba kodéru. Je to jednoduché, levné a funguje dobře i pro lehké zatížení při středních rychlostech. Steppery však mohou v podmínkách přetížení vynechávat kroky bez jakékoli autokorekce a ve vyšších otáčkách ztrácejí významný točivý moment.
Střídavý servomotor naproti tomu díky kodéru vždy přesně ví, kde se nachází. Při zatížení neztrácí pozici, rychleji reaguje na povely a udržuje si plný točivý moment v širokém rozsahu otáček. Kompromisem je cena a složitost — servosystém (ladění kabelů pohonu motoru) stojí podstatně více než krokové nastavení ekvivalentní velikosti.
Zde je jednoduché pravidlo: použijte stepper pro jednoduché polohování s nízkou zátěží a nízkou rychlostí tam, kde jsou náklady kritické. Střídavý servomotor použijte, když potřebujete vysokou rychlost, vysoký točivý moment, dynamické změny zatížení nebo když je přesnost polohy nesmlouvavá.

Běžné aplikace AC servomotorů
Střídavé servomotory se objevují téměř v každém odvětví, kde je vyžadován řízený pohyb. Některé z nejběžnějších aplikací zahrnují:
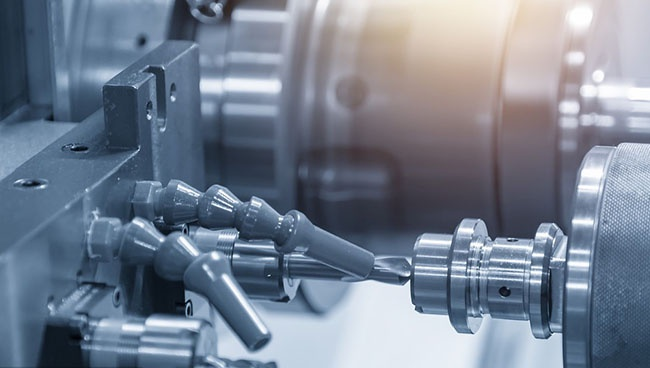
- CNC obráběcí centra: Servomotory pohánějí osy X, Y a Z frézek a soustruhů a v některých konfiguracích také vřeteno. Umožňují stroji řezat složité tvary s přesností na úrovni mikronů.
- Průmyslové roboty: Každý kloub ramene 6osého robota je obvykle poháněn vlastním servomotorem. Koordinované ovládání všech kloubů umožňuje plynulý a přesný pohyb po složitých drahách.
- Balicí stroje: Servomotory řídí operace indexování, řezání, těsnění a plnění ve vysokorychlostních balicích linkách, kde je opakovatelnost a rychlost zásadní.
- Výroba polovodičů: Manipulace s destičkami, systémy pick-and-place a kontrolní zařízení se spoléhají na servomotory pro opakovatelnost polohování na úrovni nanometrů.
- Tisk a převod: Řízení soutisku v tiskařských lisech a řízení napětí v systémech manipulace s pásem závisí na servomotorech, aby bylo zajištěno konzistentní podávání materiálu.
- Lékařské vybavení: CT skenery, chirurgické roboty a infuzní pumpy používají malé, přesné servomotory k zajištění bezpečného a přesného provozu.
Jak vybrat správný AC servomotor
Výběr správného AC servomotoru spočívá v pečlivém přizpůsobení schopností motoru požadavkům vaší aplikace. Uspěchání tohoto kroku vede buď k podvýkonnému systému, který selže v terénu, nebo k předimenzovanému a předraženému řešení. Postupujte takto:
Krok 1 — Definujte své požadavky na zatížení
Začněte výpočtem zatěžovacího momentu, který zahrnuje pohybovanou sílu nebo hmotnost, tření a jakýkoli mechanický převod (převodovka, řemen, kuličkový šroub). Vypočítejte také setrvačnost zátěže – to vám říká, kolik energie musí motor poskytnout, aby zrychlil zátěž. Obecným průmyslovým vodítkem je udržovat poměr setrvačnosti zátěže k motoru pod 10:1 pro dobrou stabilitu řízení a ideálně 3:1 nebo méně pro vysoce dynamické aplikace.
Krok 2 — Definujte svůj pohybový profil
Načrtněte graf rychlosti vs. čas pro váš pohybový cyklus. Poznamenejte si požadovanou špičkovou rychlost, doby zrychlení a zpomalení a pracovní cyklus (jak dlouho motor běží nepřetržitě vs. klid). To určuje jak potřebný špičkový točivý moment (během zrychlení), tak RMS (střední kvadratická hodnota) točivého momentu, který musí zůstat pod jmenovitým trvalým točivým momentem motoru, aby nedošlo k přehřátí.
Krok 3 — Vyberte rám motoru a jmenovitý výkon
Jakmile znáte své požadavky na točivý moment a otáčky, vyberte motor s jmenovitým točivým momentem a jmenovitou rychlostí, které pohodlně pokrývají vaše potřeby s určitou rezervou (obvykle 20–30 %). Také si ověřte, že fyzická velikost rámu odpovídá vašemu montážnímu prostoru – servomotory jsou obvykle k dispozici ve velikostech přírub od 40 mm do 200 mm nebo větší.
Krok 4 — Přizpůsobte servopohon
Servopohon musí být přizpůsoben napětí, proudu a typu enkodéru motoru. Většina výrobců prodává přizpůsobené sady motorových pohonů (např. řada Yaskawa Sigma, řada Mitsubishi MR-J, řada Siemens S-1FK), což zjednodušuje nastavení. Pokud mícháte značky, pečlivě ověřte kompatibilitu napříč jmenovitým napětím, protokolem kodéru (inkrementální, absolutní, EnDat, BiSS-C atd.) a řídicím rozhraním (pulzní/směrové, analogové ±10V, EtherCAT, PROFINET atd.).
Krok 5 — Zvažte podmínky prostředí
Zkontrolujte provozní prostředí. Pokud bude motor vystaven působení chladicí kapaliny, prachu nebo mytí, potřebujete motor s krytím IP65 nebo IP67. Pokud bude pracovat při extrémních teplotách, ověřte rozsah okolní teploty motoru. Pro potravinářské a nápojové nebo farmaceutické aplikace mohou být vyžadovány hřídelové těsnění z nerezové oceli a speciální povlaky.
Základy zapojení a instalace
Správná instalace AC servomotoru je stejně důležitá jako výběr toho správného. Je třeba mít na paměti několik klíčových bodů:
- Oddělené napájecí a signálové kabely: Vždy veďte napájecí kabel motoru (fáze U, V, W) odděleně od kabelu zpětné vazby kodéru. Jejich provoz ve stejném potrubí může způsobit rušení, které destabilizuje regulační smyčku.
- Použijte stíněné kabely: Jak napájecí kabel, tak kabel kodéru by měly být stíněné, přičemž stínění by mělo být na jednom konci (obvykle na straně měniče) uzemněno, aby se zabránilo rušení.
- Uzemněte tělo motoru: Skříň motoru musí být připojena k uzemnění rámu stroje, aby se předešlo úrazu elektrickým proudem a snížily se emise EMI.
- Zkontrolujte sled fází: Připojení U, V, W se mezi motorem a měničem musí shodovat. Pokud se motor otáčí špatným směrem, vyměňte libovolné dva fázové vodiče – nikdy nezaměňujte vodiče kodéru, abyste určili směr.
- Použijte dynamický brzdný rezistor: U motorů pohánějících vertikální zatížení nebo vyžadujících rychlé zastavení externí brzdný odpor připojený k měniči absorbuje regenerační energii během zpomalování a zabraňuje poruchám přepětí.
Vyladění servopohonu: Získejte nejlepší výkon
Po zapojení je třeba servopohon vyladit tak, aby regulační smyčka správně reagovala pro vaši konkrétní kombinaci motoru a zátěže. Většina moderních servopohonů obsahuje funkci automatického ladění, která roztočí motor pomocí testovací rutiny a automaticky vypočítá optimální nastavení zisku. To je obvykle dost dobré pro standardní aplikace.
Pro náročné aplikace – jako je vysokorychlostní pick-and-place nebo přesné broušení – může být vyžadováno ruční ladění tří hlavních zesílení PID (zisk polohy, zesílení rychlosti a integrální zesílení). Zvyšování zisků způsobí, že systém reaguje rychleji a tužší, ale příliš vysoko a systém se stává nestabilním a osciluje. Cílem je dosáhnout rychlé odezvy bez přepalů nebo lovu.
Většina měničů také umožňuje nastavit zářezové filtry pro potlačení mechanických rezonančních frekvencí, dopředné zisky pro zlepšení přesnosti sledování během zrychlení a kompenzaci tření pro snížení polohové chyby při nízkých rychlostech. Věnovat čas správnému vyladění těchto nastavení může mít významný rozdíl v konečné přesnosti polohování a průchodnosti stroje.
Tipy pro údržbu a odstraňování problémů
Střídavé servomotory jsou obecně velmi spolehlivé, protože nemají žádné kartáče nebo komutátor, který by se opotřebovával. V průběhu času je však stále potřeba určitá údržba:
- Výměna ložisek: Ložiska motoru jsou nejčastějším předmětem opotřebení. Většina výrobců specifikuje intervaly výměny ložisek na základě provozních hodin – obvykle každých 20 000 až 30 000 hodin. Nadměrné vibrace nebo hluk jsou prvním příznakem opotřebení ložisek.
- Kontrola kabelu kodéru: Kabely kodéru se často opakovaně ohýbají (zejména na ramenech robotů nebo portálových systémech) a mohou se časem přerušit. Pokud servo začne vykazovat chybné polohové chyby nebo závady, podezřívejte nejprve kabel kodéru.
- Kontroly přehřátí: Pokud je motor horký, ověřte, zda je pracovní cyklus v rámci specifikací, zda je okolní teplota přijatelná a zda je povrch motoru čistý a bez překážek. Trvalé přehřívání zhoršuje izolaci vinutí a zkracuje životnost motoru.
- Kódy alarmu pohonu: Když dojde k poruše, vždy načtěte kód alarmu z displeje servopohonu nebo softwaru. Mezi běžné kódy patří přepětí, nadproud, chyba kodéru, přetížení a překročení odchylky polohy. Každý ukazuje přímo na hlavní příčinu.
Vedení deníku údržby o provozních hodinách motoru, historii alarmů a jakýchkoli fyzických kontrolách představuje dlouhou cestu k předpovídání poruch dříve, než způsobí neplánované odstávky.
Předchozí příspěvek
Žádný předchozí článek
Další příspěvek
Vysvětlení vysokonapěťového měniče frekvence: Jak to funguje, jakou topologii zvolit a co specifikovat
autorská práva 2024 Fujian Raynen Technology Co., Ltd. Všechna práva vyhrazena.
Zásady ochrany osobních údajů  Výrobci řízení motorů
Výrobci řízení motorů